Pendulum-and-hydrostat control
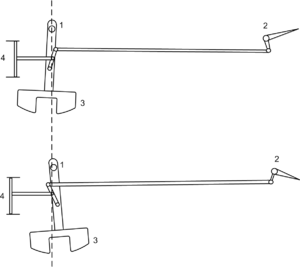
1. Pendulum pivot.
2. Elevator and fixed pivot.
3. Pendulum weight.
4. Hydrostat pressure valve.
Pendulum-and-hydrostat control is a simple system for automatically controlling the depth in water of a machine. The hydrostat senses the depth; initially, this function was sometimes performed by a simple bellows. However, with only a hydrostat the system would tend to oscillate around the desired depth. The pendulum, mounted at right angles within the machine, senses the angle at which the machine sits relative to the horizontal. The angle information is combined with the depth information in order to provide control signals to the machine's vertical-plane steering mechanism. The angle information is key in that it provides a damping term to the oscillation.
In control theory the effect of the addition of the pendulum can be explained as turning the simple proportional controller into a proportional-derivative controller since the depth keeping is not controlled by the depth alone anymore but also by the derivative (rate of change) of the depth which is roughly proportional to the angle of the machine.[1]
It was mainly used to control the depth of torpedoes until the end of the Second World War, and reduced depth errors from ±40 feet (12 meters) to as little as ±6 inches (0.15 m).
It was invented by Robert Whitehead and was nicknamed The Secret.
References
- ↑ Bennett, "A History of control engineering: 1800-1930"
External links
- http://archive.is/DIiw
- http://www.webcitation.org/query?url=http://www.geocities.com/Pentagon/1592/ustorp1.htm&date=2009-10-25+09:25:57