N-localizer
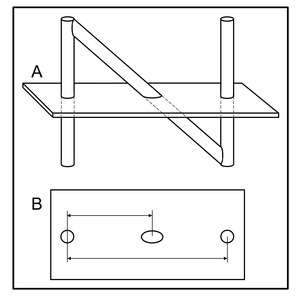


The N-localizer[3][4][5][6][7][8][9] (aka N-bar) is a device that enables guidance of stereotactic surgery or radiosurgery using tomographic images that are obtained via medical imaging technologies such as X-ray computed tomography (CT), magnetic resonance imaging (MRI) or positron emission tomography (PET).[10][11][12][13][14][15][16][17] The N-localizer comprises a diagonal rod that extends from the top of one vertical rod to the bottom of a second vertical rod, and is shaped like a capital "N" (Figure 1A). This device was invented in 1978 by the American physician and computer scientist Russell Brown.[18][19]
This invention stimulated renewed interest in, and further development of, image-guided surgery, specifically, stereotactic surgery and radiosurgery. It has achieved widespread clinical use in the Brown-Roberts-Wells (BRW),[20] Leksell,[21] Kelly-Goerss[22] and Cosman-Roberts-Wells (CRW)[23] stereotactic instruments and in the Gamma Knife[24] streotactic radiosurgery system.
How it works
Medical images that are obtained using technologies such as computed tomography (CT), magnetic resonance imaging (MRI) and positron emission tomography (PET) are two-dimensional, planar, tomographic images of patient anatomy. Treatment modalities such as stereotactic surgery and radiosurgery operate in the three-dimensional space of the patient. Hence, the central problem with using CT, MRI or PET to guide stereotactic surgery or radiosurgery is the transfer of patient information from the two-dimensional coordinate system of the planar CT, MRI or PET image into the three-dimensional coordinate system of the stereotactic or radiosurgical instrument. The N-localizer provides an elegant solution to this problem by creating fiducial marks or landmarks in each tomographic image. The N-localizer comprises a diagonal rod that extends from the top of one vertical rod to the bottom of a second vertical rod (Figure 1). This combination of rods creates two circles and one ellipse in a tomographic image. The ellipse moves away from one circle and towards the other circle as the image plane moves downward with respect to the N-localizer. Measuring the relative distances between the ellipse and the two circles permits calculation of the point where the image plane intersects the diagonal rod. The attachment of three N-localizers to a stereotactic instrument (Figure 2) permits calculation of three points where the image plane intersects the three diagonal rods (Figure 3). Because three points determine a plane in three-dimensional space, these three points of intersection determine the spatial orientation of the image plane relative to the stereotactic instrument. Therefore, the spatial orientation of any patient anatomy that is seen in the planar image is also determined relative to the stereotactic instrument. Because the spatial orientation of the patient anatomy is determined unambiguously relative to the stereotactic instrument, patient information may be transferred from the two-dimensional coordinate system of the planar image into the three-dimensional coordinate system of the stereotactic instrument.[25][26][27]
References
- ↑ Brown, Russell A. (1979). "A computerized tomography-computer graphics approach to stereotaxic localization". Journal of Neurosurgery. 50 (6): 715–20. doi:10.3171/jns.1979.50.6.0715. PMID 374688.
- ↑ Brown RA, Roberts TS, Osborn AG (1981). "Simplified CT-guided stereotaxic biopsy". American Journal of Neuroradiology. 2 (2): 181–184. PMID 6784559.
- ↑ Galloway, RL Jr. (2015). "Introduction and Historical Perspectives on Image-Guided Surgery". In Golby, AJ. Image-Guided Neurosurgery. Amsterdam: Elsevier. pp. 3–4.
- ↑ Tse, VCK; Kalani, MYS; Adler, JR (2015). "Techniques of Stereotactic Localization". In Chin, LS; Regine, WF. Principles and Practice of Stereotactic Radiosurgery. New York: Springer. p. 28.
- ↑ Saleh, H; Kassas, B (2015). "Developing Stereotactic Frames for Cranial Treatment". In Benedict, SH; Schlesinger, DJ; Goetsch, SJ; Kavanagh, BD. Stereotactic Radiosurgery and Stereotactic Body Radiation Therapy. Boca Raton: CRC Press. pp. 156–159.
- ↑ Khan, FR; Henderson, JM (2013). "Deep Brain Stimulation Surgical Techniques". In Lozano, AM; Hallet, M. Brain Stimulation: Handbook of Clinical Neurology. 116. Amsterdam: Elsevier. pp. 28–30.
- ↑ Arle, J (2009). "Development of a Classic: the Todd-Wells Apparatus, the BRW, and the CRW Stereotactic Frames". In Lozano, AM; Gildenberg, PL; Tasker, RR. Textbook of Stereotactic and Functional Neurosurgery. Berlin: Springer-Verlag. pp. 456–461.
- ↑ Sharan, AD; Andrews, DW (2003). "Stereotactic Frames: Technical Considerations". In Schulder, M; Gandhi, CD. Handbook of Stereotactic and Functional Neurosurgery. New York: Marcel Dekker. pp. 16–17.
- ↑ Apuzzo, MLJ; Fredericks, CA (1988). "The Brown-Roberts-Wells System". In Lunsford, LD. Modern Stereotactic Neurosurgery. Boston: Martinus Nijhoff Publishing. pp. 63–77.
- ↑ Heilbrun MP, Roberts TS, Apuzzo ML, Wells TH Jr, Sabshin JK (1983). "Preliminary experience with Brown-Roberts-Wells (BRW) computerized tomography stereotaxic guidance system". Journal of Neurosurgery. 59 (2): 217–222. doi:10.3171/jns.1983.59.2.0217. PMID 6345727.
- ↑ Thomas DG, Anderson RE, du Boulay GH (1984). "CT-guided stereotactic neurosurgery: experience in 24 cases with a new stereotactic system". Journal of Neurology, Neurosurgery & Psychiatry. 47 (1): 9–16. doi:10.1136/jnnp.47.1.9. PMC 1027634
 . PMID 6363629.
. PMID 6363629. - ↑ Leksell L, Leksell D, Schwebel J (1985). "Stereotaxis and nuclear magnetic resonance". Journal of Neurology, Neurosurgery & Psychiatry. 48 (1): 14–18. doi:10.1136/jnnp.48.1.14. PMC 1028176. PMID 3882889.
- ↑ Thomas DG, Davis CH, Ingram S, Olney JS, Bydder GM, Young IR (1986). "Stereotaxic biopsy of the brain under MR imaging control". AJNR American Journal of Neuroradiology. 7 (1): 161–163. PMID 3082131.
- ↑ Heilbrun MP, Sunderland PM, McDonald PR, Wells TH Jr, Cosman E, Ganz E (1987). "Brown-Roberts-Wells stereotactic frame modifications to accomplish magnetic resonance imaging guidance in three planes". Applied Neurophysiology. 50 (1-6): 143–152. doi:10.1159/000100700. PMID 3329837.
- ↑ Maciunas RJ, Kessler RM, Maurer C, Mandava V, Watt G, Smith G (1992). "Positron emission tomography imaging-directed stereotactic neurosurgery". Stereotactic and Functional Neurosurgery. 58 (1-4): 134–140. doi:10.1159/000098986. PMID 1439330.
- ↑ Levivier M, Massager N, Wikler D, Lorenzoni J, Ruiz S, Devriendt D, David P, Desmedt F, Simon S, Van Houtte P, Brotchi J, Goldman S (2004). "Use of stereotactic PET images in dosimetry planning of radiosurgery for brain tumors: clinical experience and proposed classification". Journal of Nuclear Medicine. 45 (7): 1146–1154. PMID 15235060.
- ↑ Perry, Janice (October 2, 1983). "New system may improve brain surgery". Times Daily. Retrieved 19 May 2011.
- ↑ Brown RA, Nelson JA (2012). "Invention of the N-localizer for stereotactic neurosurgery and its use in the Brown-Roberts-Wells stereotactic frame". Neurosurgery. 70 (2 Supplement Operative): 173–176. doi:10.1227/NEU.0b013e318246a4f7. PMID 22186842.
- ↑ Brown RA, Nelson JA (2016). "The invention and early history of the N-localizer for stereotactic neurosurgery". Cureus. 8 (6): e642. doi:10.7759/cureus.642. PMC 4959822. PMID 27462476.
- ↑ Brown RA, Roberts TS, Osborn AG (1980). "Stereotaxic frame and computer software for CT-directed neurosurgical localization". Investigative Radiology. 15 (4): 308–12. doi:10.1097/00004424-198007000-00006. PMID 7009485.
- ↑ Leksell L, Jernberg B (1980). "Stereotaxis and tomography. A technical note.". Acta Neurochirugica. 52 (1-2): 1–7. doi:10.1007/BF01400939. PMID 6990697.
- ↑ Goerss S, Kelly PJ, Kall B, Alker GJ Jr (1982). "A computed tomographic stereotactic adaptation system". Neurosurgery. 10 (3): 375–9. doi:10.1097/00006123-198203000-00014. PMID 7041006.
- ↑ Couldwell WT, Apuzzo ML (1990). "Initial experience related to the Cosman-Roberts-Wells stereotactic instrument. Technical note". Journal of Neurosurgery. 72 (1): 145–8. doi:10.3171/jns.1990.72.1.0145. PMID 2403588.
- ↑ Lindquist, Christer (2007). "The Leksell Gamma Knife Perfexion and comparisons with its predecessors". Neurosurgery. 61: ONS130–ONS141. doi:10.1227/01.neu.0000316276.20586.dd. PMID 18596433.
- ↑ Brown, Russell A. (1979). "A stereotactic head frame for use with CT body scanners". Investigative Radiology. 14 (4): 300–4. doi:10.1097/00004424-197907000-00006. PMID 385549.
- ↑ Brown RA (2015). "The mathematics of three N-localizers used together for stereotactic neurosurgery". Cureus. 7 (10): e341. doi:10.7759/cureus.341. PMC 4636133. PMID 26594605.
- ↑ Brown RA (2015). "The mathematics of four or more N-localizers for stereotactic neurosurgery". Cureus. 7 (10): e349. doi:10.7759/cureus.349. PMC 4641741. PMID 26623204.