AVL tree
| AVL tree | ||
|---|---|---|
| Type | Tree | |
| Invented | 1962 | |
| Invented by | Georgy Adelson-Velsky and Evgenii Landis | |
| Time complexity in big O notation | ||
| Average | Worst case | |
| Space | O(n) | O(n) |
| Search | O(log n)[1] | O(log n)[1] |
| Insert | O(log n)[1] | O(log n)[1] |
| Delete | O(log n)[1] | O(log n)[1] |
In computer science, an AVL tree is a self-balancing binary search tree. It was the first such data structure to be invented.[2] In an AVL tree, the heights of the two child subtrees of any node differ by at most one; if at any time they differ by more than one, rebalancing is done to restore this property. Lookup, insertion, and deletion all take O(log n) time in both the average and worst cases, where n is the number of nodes in the tree prior to the operation. Insertions and deletions may require the tree to be rebalanced by one or more tree rotations.
The AVL tree is named after its two Soviet inventors, Georgy Adelson-Velsky and Evgenii Landis, who published it in their 1962 paper "An algorithm for the organization of information".[3]
AVL trees are often compared with red–black trees because both support the same set of operations and take O(log n) time for the basic operations. For lookup-intensive applications, AVL trees are faster than red–black trees because they are more strictly balanced.[4] Similar to red–black trees, AVL trees are height-balanced. Both are in general not weight-balanced nor μ-balanced for any μ≤1⁄2;[5] that is, sibling nodes can have hugely differing numbers of descendants.
Definition
Balance factor
In a binary tree the balance factor of a node N is defined to be the height difference
- BalanceFactor(N) := –Height(LeftSubtree(N)) + Height(RightSubtree(N)) [6]
of its two child subtrees. A binary tree is defined to be an AVL tree if the invariant
- BalanceFactor(N) ∈ {–1,0,+1}
holds for every node N in the tree.
A node N with BalanceFactor(N) < 0 is called "left-heavy", one with BalanceFactor(N) > 0 is called "right-heavy", and one with BalanceFactor(N) = 0 is sometimes simply called "balanced".
- Remark
In the sequel, because there is a one-to-one correspondence between nodes and the subtrees rooted by them, we sometimes leave it to the context whether the name of an object stands for the node or the subtree.
Properties
Balance factors can be kept up-to-date by knowing the previous balance factors and the change in height – it is not necessary to know the absolute height. For holding the AVL balance information, two bits per node are sufficient.[7]
The height h of an AVL tree with n nodes lies in the interval:[8]
- log2(n+1) ≤ h < c log2(n+2)+b
with the golden ratio φ := (1+√5) ⁄2 ≈ 1.618, c := 1⁄ log2 φ ≈ 1.44, and b := c⁄2 log2 5 – 2 ≈ –0.328. This is because an AVL tree of height h contains at least Fh+2 – 1 nodes where {Fh} is the Fibonacci sequence with the seed values F1 = 1, F2 = 1.
Operations
Read-only operations of an AVL tree involve carrying out the same actions as would be carried out on an unbalanced binary search tree, but modifications have to observe and restore the height balance of the subtrees.
Searching
Searching for a specific key in an AVL tree can be done the same way as that of a normal unbalanced binary search tree. In order for search to work effectively it has to employ a comparison function which establishes a total order (or at least a total preorder) on the set of keys. The number of comparisons required for successful search is limited by the height h and for unsuccessful search is very close to h, so both are in O(log n).
Traversal
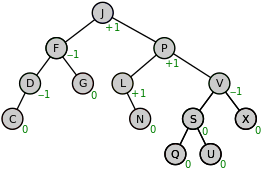
Once a node has been found in an AVL tree, the next or previous node can be accessed in amortized constant time. Some instances of exploring these "nearby" nodes require traversing up to h ∝ log(n) links (particularly when navigating from the rightmost leaf of the root’s left subtree to the root or from the root to the leftmost leaf of the root’s right subtree; in the AVL tree of figure 1, moving from node P to the next but one node Q takes 3 steps). However, exploring all n nodes of the tree in this manner would visit each link exactly twice: one downward visit to enter the subtree rooted by that node, another visit upward to leave that node’s subtree after having explored it. And since there are n−1 links in any tree, the amortized cost is found to be 2×(n−1)/n, or approximately 2.
Insert
When inserting an element into an AVL tree, you initially follow the same process as inserting into a Binary Search Tree. Once this has been completed, you verify that the tree maintains the AVL property. If it does not, then you perform tree rotations going upwards from the inserted node to rectify this.
Delete
When deleting an element from an AVL tree, swap the desired element with the minimum element in the right subtree, or maximum element in the left subtree. Once this has been completed delete the element from the new position (the process may need to be repeated). If the element is now a leaf node, remove it completely. Make sure to perform rotations to maintain the AVL property.
Comparison to other structures
Both AVL trees and red–black trees are self-balancing binary search trees and they are related mathematically. Indeed, every AVL tree can be colored red–black. The operations to balance the trees are different; both AVL trees and red-black require O(1) rotations in the worst case, while both also require O(log n) other updates (to colors or heights) in the worst case (though only O(1) amortized). AVL trees require storing 2 bits (or one trit) of information in each node, while red-black trees require just one bit per node. The bigger difference between the two data structures is their height limit.
For a tree of size n ≥ 1
- an AVL tree’s height is at most

- where the golden ratio, and .




- a red–black tree’s height is at most

AVL trees are more rigidly balanced than red–black trees, leading to faster retrieval but slower insertion and deletion.
See also
References
- 1 2 3 4 5 6 Eric Alexander. "AVL Trees".
- ↑ Robert Sedgewick, Algorithms, Addison-Wesley, 1983, ISBN 0-201-06672-6, page 199, chapter 15: Balanced Trees.
- ↑ Georgy Adelson-Velsky, G.; Evgenii Landis (1962). "An algorithm for the organization of information". Proceedings of the USSR Academy of Sciences (in Russian). 146: 263–266. English translation by Myron J. Ricci in Soviet Math. Doklady, 3:1259–1263, 1962.
- ↑ Pfaff, Ben (June 2004). "Performance Analysis of BSTs in System Software" (PDF). Stanford University.
- ↑ AVL trees are not weight-balanced? (meaning: AVL trees are not μ-balanced?)
Thereby: A Binary Tree is called -balanced, with , if for every node , the inequality - ↑ Knuth, Donald E. (2000). Sorting and searching (2. ed., 6. printing, newly updated and rev. ed.). Boston [u.a.]: Addison-Wesley. p. 459. ISBN 0-201-89685-0.
- ↑ More precisely: if the AVL balance information is kept in the child nodes – with meaning "when going upward there is an additional increment in height", this can be done with one bit. Nevertheless, the modifying operations can be programmed more efficiently if the balance information can be checked with one test.
- ↑ Knuth, Donald E. (2000). Sorting and searching (2. ed., 6. printing, newly updated and rev. ed.). Boston [u.a.]: Addison-Wesley. p. 460. ISBN 0-201-89685-0.
- ↑ Red–black tree#Proof of asymptotic bounds






Further reading
- Donald Knuth. The Art of Computer Programming, Volume 3: Sorting and Searching, Third Edition. Addison-Wesley, 1997. ISBN 0-201-89685-0. Pages 458–475 of section 6.2.3: Balanced Trees.
External links
| The Wikibook Algorithm Implementation has a page on the topic of: AVL tree |
| Wikimedia Commons has media related to AVL-trees. |
 This article incorporates public domain material from the NIST document: Black, Paul E. "AVL Tree". Dictionary of Algorithms and Data Structures.
This article incorporates public domain material from the NIST document: Black, Paul E. "AVL Tree". Dictionary of Algorithms and Data Structures.- AVL tree demonstration (HTML5/Canvas)
- AVL tree demonstration (requires Flash)
- AVL tree demonstration (requires Java)